QPFixedBaseInverseKinematics class
QPFixedBaseInverseKinematics is specialization of QPInverseKinematics class in the case of fixed base system.
The IK is here implemented as Quadratic Programming (QP) problem. The user should set the desired task with the method QPFixedBaseInverseKinematics::
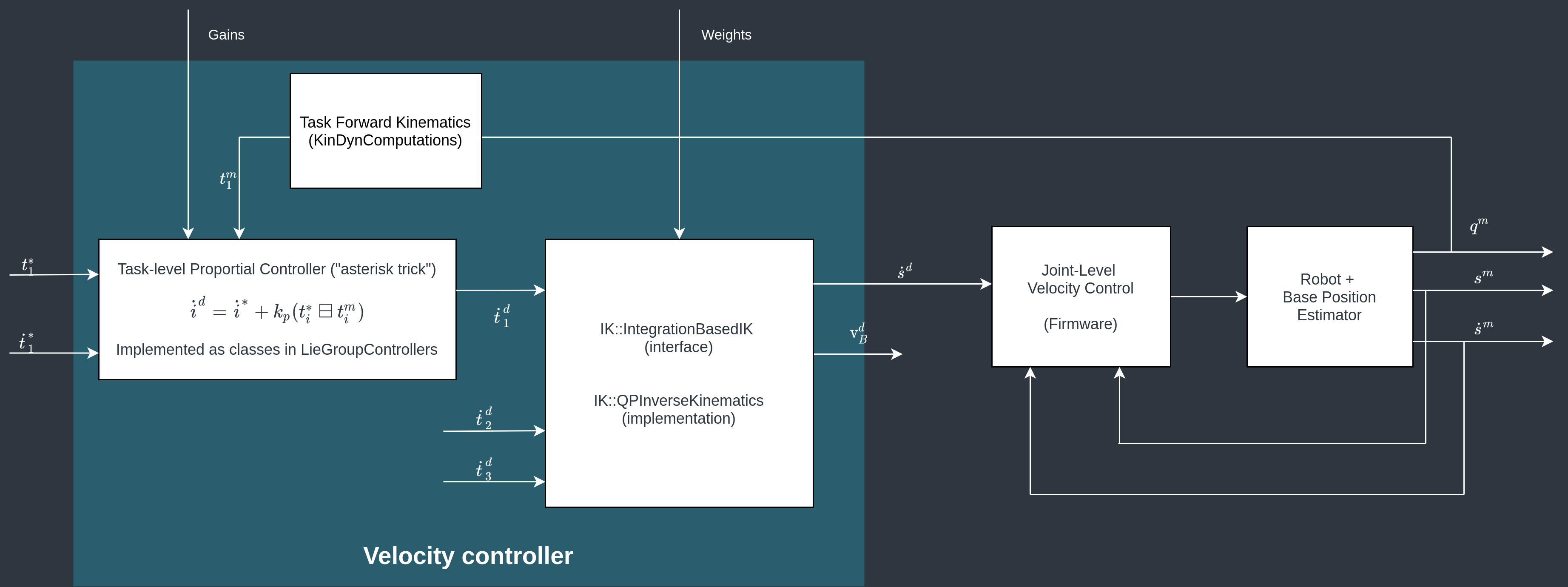
Velocity Control
Here you can find an example of the QPFixedBaseInverseKinematics interface used as a velocity controller.
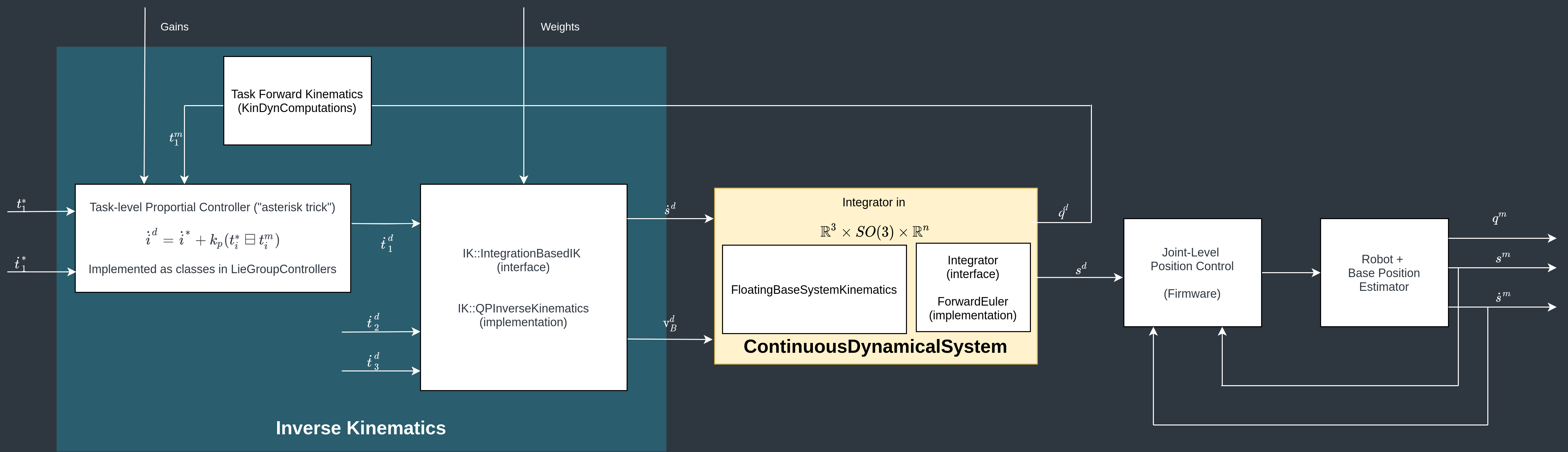
Inverse Kinematics
If you want to use QPFixedBaseInverseKinematics as IK you need to integrate the output velocity. System::FloatingBaseSystemKinematics and System::Integrator classes can be used to integrate the output of the IK taking into account the geometrical structure of the configuration space ( )
Base classes
- class QPInverseKinematics
- QPInverseKinematics is a concrete class and implements an integration base inverse kinematics.
Constructors, destructors, conversion operators
- QPFixedBaseInverseKinematics()
- Constructor.
- ~QPFixedBaseInverseKinematics()
- Destructor.
Public functions
-
auto initialize(std::weak_ptr<const ParametersHandler::
IParametersHandler> handler) -> bool override - Initialize the IK algorithm.
- auto setKinDyn(std::shared_ptr<iDynTree::KinDynComputations> kinDyn) -> bool
- Set the kinDynComputations object.
Function documentation
bool BipedalLocomotion::
Initialize the IK algorithm.
| Parameters | |
|---|---|
| handler | pointer to the IParametersHandler interface.h |
| Returns | True in case of success, false otherwise. |
bool BipedalLocomotion::
Set the kinDynComputations object.
| Parameters | |
|---|---|
| kinDyn | pointer to a kinDynComputations object. |
| Returns | True in case of success, false otherwise. |