QPInverseKinematics class
QPInverseKinematics is a concrete class and implements an integration base inverse kinematics.
The inverse kinematics is here implemented as Quadratic Programming (QP) problem. The user should set the desired task with the method QPInverseKinematics::
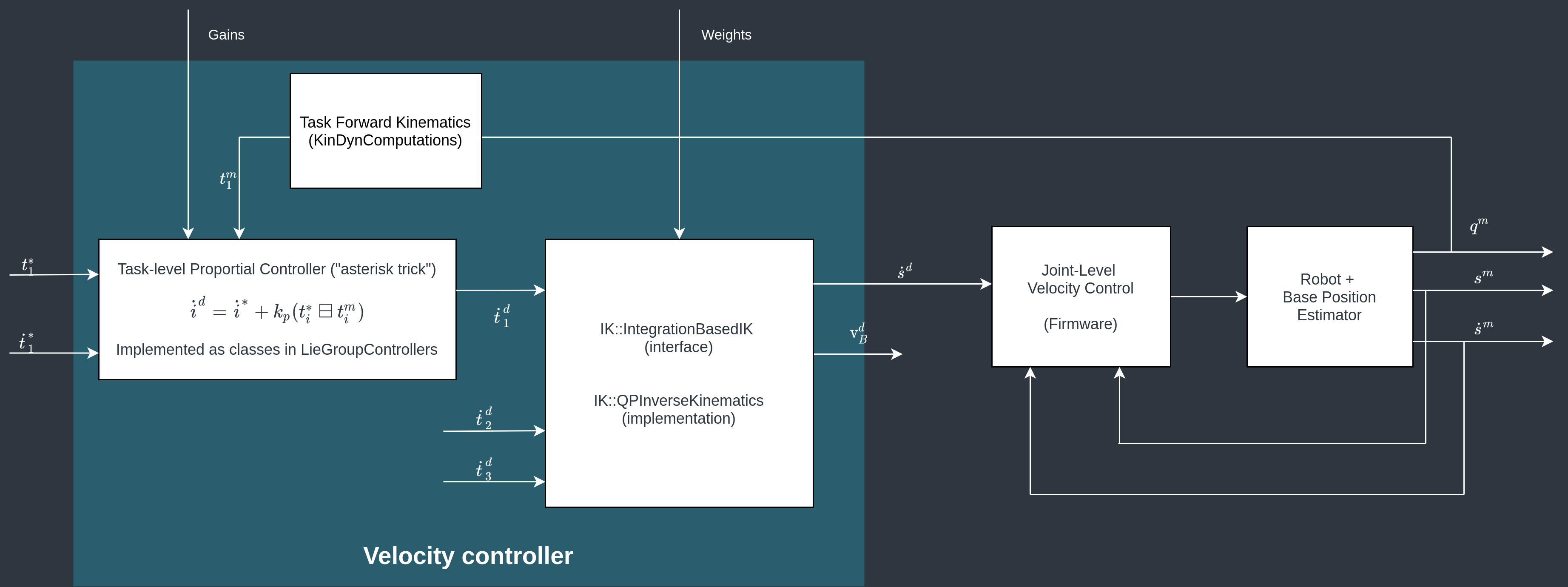
Velocity Control
Here you can find an example of the QPFixedBaseInverseKinematics interface used as a velocity controller.
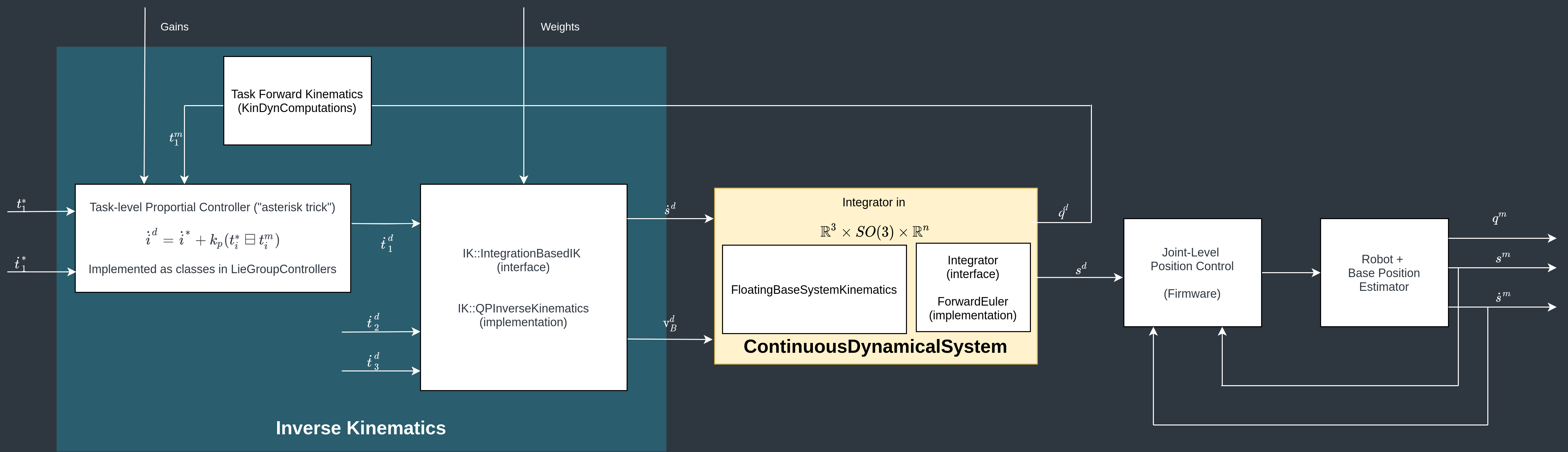
Inverse Kinematics
If you want to use QPInverseKinematics as IK you need to integrate the output velocity. System::FloatingBaseSystemKinematics and System::Integrator classes can be used to integrate the output of the IK taking into account the geometrical structure of the configuration space ( )
Base classes
- class IntegrationBasedIK
- IntegrationBasedIK implements the interface for the integration base inverse kinematics.
Derived classes
- class QPFixedBaseInverseKinematics
- QPFixedBaseInverseKinematics is specialization of QPInverseKinematics class in the case of fixed base system.
Public static functions
-
static auto build(std::weak_ptr<const ParametersHandler::
IParametersHandler> handler, std::shared_ptr<iDynTree::KinDynComputations> kinDyn) -> IntegrationBasedIKProblem - Build the inverse kinematics solver.
Constructors, destructors, conversion operators
- QPInverseKinematics()
- Constructor.
- ~QPInverseKinematics() virtual
- Destructor.
Public functions
-
auto addTask(std::shared_ptr<Task> task,
const std::string& taskName,
std::size_t priority,
std::shared_ptr<const System::
WeightProviderPort> weightProvider = nullptr) -> bool override - Add a linear task in the solver.
- auto addTask(std::shared_ptr<Task> task, const std::string& taskName, std::size_t priority, Eigen::Ref<const Eigen::VectorXd> weight) -> bool override
- Add a linear task in the solver.
-
auto setTaskWeight(const std::string& taskName,
std::shared_ptr<const System::
WeightProviderPort> weightProvider) -> bool override - Set the weightProvider associated to an already existing task.
- auto setTaskWeight(const std::string& taskName, Eigen::Ref<const Eigen::VectorXd> weight) -> bool override
- Set the weight associated to an already existing task.
-
auto getTaskWeightProvider(const std::string& taskName) const -> std::weak_ptr<const System::
WeightProviderPort> override - Get the weightProvider associated to an already existing task.
-
auto finalize(const System::
VariablesHandler& handler) -> bool override - Finalize the IK.
-
auto initialize(std::weak_ptr<const ParametersHandler::
IParametersHandler> handler) -> bool override - Initialize the inverse kinematics algorithm.
- auto getTaskNames() const -> std::vector<std::string> override
- Get a vector containing the name of the tasks.
- auto isOutputValid() const -> bool override
- Return true if the content of get is valid.
- auto advance() -> bool override
- Solve the inverse kinematics.
- auto getOutput() const -> const State& override
- Get the outcome of the optimization problem.
- auto getTask(const std::string& name) const -> std::weak_ptr<Task> override
- Get a specific task.
- auto toString() const -> std::string override
- Return the description of the InverseKinematics problem.
- auto getRawSolution() const -> Eigen::Ref<const Eigen::VectorXd> override
- Return the vector representing the entire solution of the QPInverseKinematics.
Function documentation
static IntegrationBasedIKProblem BipedalLocomotion::
Build the inverse kinematics solver.
| Parameters | |
|---|---|
| handler | pointer to the IParametersHandler interface. |
| kinDyn | a pointer to an iDynTree::KinDynComputations object that will be shared among all the tasks. |
| Returns | an IntegrationBasedIKProblem. In case of issues an invalid IntegrationBasedIKProblem will be returned. |
bool BipedalLocomotion::
Add a linear task in the solver.
| Parameters | |
|---|---|
| task | pointer to a given linear task |
| taskName | unique name associated to the task. |
| priority | Priority associated to the task. The lower the number the higher the priority. |
| weightProvider | Weight provider associated to the task. This parameter is optional. The default value is an object that does not contain any value. The user may avoid to pass a provider only if the priority of the task is equal to 0. |
| Returns | true if the task has been added to the solver. |
bool BipedalLocomotion::
Add a linear task in the solver.
| Parameters | |
|---|---|
| task | pointer to a given linear task |
| taskName | unique name associated to the task. |
| priority | Priority associated to the task. The lower the number the higher the priority. |
| weight | Weight associated to the task. |
| Returns | true if the task has been added to the solver. |
bool BipedalLocomotion::
Set the weightProvider associated to an already existing task.
| Parameters | |
|---|---|
| taskName | name associated to the task |
| weightProvider | new weight provider associated to the task. |
| Returns | true if the weight has been updated |
bool BipedalLocomotion::
Set the weight associated to an already existing task.
| Parameters | |
|---|---|
| taskName | name associated to the task |
| weight | new Weight associated to the task. A constant weight is assumed. |
| Returns | true if the weight has been updated |
std::weak_ptr<const System::
Get the weightProvider associated to an already existing task.
| Parameters | |
|---|---|
| taskName | name associated to the task |
| Returns | a weak pointer to the weightProvider. If the task does not exist the pointer is not lockable |
bool BipedalLocomotion::
Finalize the IK.
| Parameters | |
|---|---|
| handler | parameter handler. |
| Returns | true in case of success, false otherwise. |
bool BipedalLocomotion::
Initialize the inverse kinematics algorithm.
| Parameters | |
|---|---|
| handler | pointer to the IParametersHandler interface. |
| Returns | True in case of success, false otherwise. |
std::vector<std::string> BipedalLocomotion::
Get a vector containing the name of the tasks.
| Returns | an std::vector containing all the names associated to the tasks |
|---|
bool BipedalLocomotion::
Solve the inverse kinematics.
| Returns | true in case of success and false otherwise. |
|---|
const State& BipedalLocomotion::
Get the outcome of the optimization problem.
| Returns | the state of the inverse kinematics. |
|---|
std::weak_ptr<Task> BipedalLocomotion::
Get a specific task.
| Parameters | |
|---|---|
| name | name associated to the task. |
| Returns | a weak ptr associated to an existing task in the IK. If the task does not exist a nullptr is returned. |
std::string BipedalLocomotion::
Return the description of the InverseKinematics problem.
| Returns | a string containing the description of the solver. |
|---|
Eigen::Ref<const Eigen::VectorXd> BipedalLocomotion::
Return the vector representing the entire solution of the QPInverseKinematics.
| Returns | a vector containing the solution of the optimization problem |
|---|