MANNAutoregressive class
MANNAutoregressive is a class that allows to perform autoregressive inference with Mode-Adaptive Neural Networks (MANN).
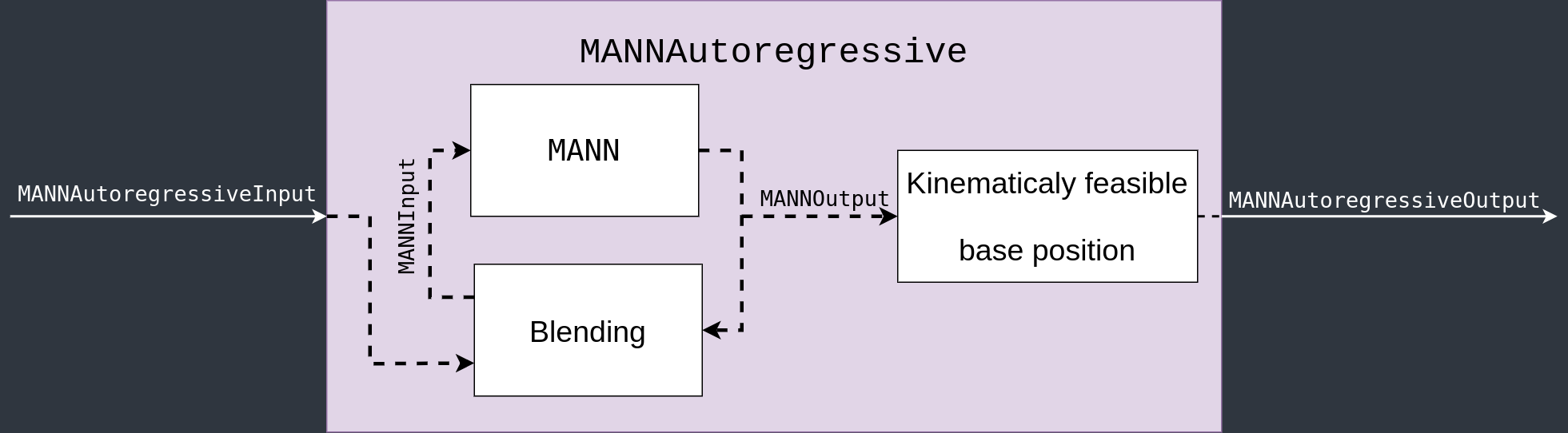
MANN Autoregressive
The following diagram shows how the MANN network is used inside the MANNAutoregressive class. The output of MANN is given to two blocks, one computes the kinematically feasible base position, while the other blends it to te input provided by the user
Base classes
-
template<class _Input, class _Output>class BipedalLocomotion::System::Advanceable<MANNAutoregressiveInput, MANNAutoregressiveOutput>
- Basic class that represents a discrete system.
Public types
- struct AutoregressiveState
- AutoregressiveState contains all quantities required to reset the Advanceable The base position trajectory, facing direction trajectory and base velocity trajectories are written in a bidimensional local reference frame L in which we assume all the quantities related to the ground-projected base trajectory in xi and yi to be expressed.
Constructors, destructors, conversion operators
- MANNAutoregressive()
- Constructor.
- ~MANNAutoregressive()
- Destructor.
Public functions
- auto setRobotModel(const iDynTree::Model& model) -> bool
- Set the robot model.
-
auto initialize(std::weak_ptr<const ParametersHandler::
IParametersHandler> paramHandler) -> bool override - Initialize the network.
- auto setInput(const Input& input) -> bool override
- Set the input to the autoregressive model.
- auto advance() -> bool override
- Perform one step of the autoregressive model.
-
auto reset(const MANNInput& input,
const Contacts::
EstimatedContact& leftFoot, const Contacts:: EstimatedContact& rightFoot, const manif::SE3d& basePose, const manif::SE3Tangentd& baseVelocity) -> bool - Reset the autoregressive model.
-
auto reset(const MANNInput& input,
const Contacts::
EstimatedContact& leftFoot, const Math:: SchmittTriggerState& leftFootSchimittTriggerState, const Contacts:: EstimatedContact& rightFoot, const Math:: SchmittTriggerState& rightFootSchimittTriggerState, const manif::SE3d& basePosition, const manif::SE3Tangentd& baseVelocity, const AutoregressiveState& autoregressiveState, const std::chrono::nanoseconds& time) -> bool - Reset the autoregressive model.
- auto isOutputValid() const -> bool override
- Check if the output is valid.
- auto getOutput() const -> const Output& override
- Get the output from MANNAutoregressive.
- auto getMANNInput() const -> const MANNInput&
- Get the structure that has been used as input for MANN.
- auto getAutoregressiveState() const -> const AutoregressiveState&
- Get the autoregressive state required to rest MANNAutoregressive.
Function documentation
bool BipedalLocomotion::
Set the robot model.
| Parameters | |
|---|---|
| model | model of the robot considered by the network. Please load the very same model with the same joint serialization used to train the MANN network. |
| Returns | true in case of success, false otherwise. |
bool BipedalLocomotion::
Initialize the network.
| Parameters | |
|---|---|
| paramHandler | pointer to the parameters handler. |
| Returns | True in case of success, false otherwise. |
bool BipedalLocomotion::
Set the input to the autoregressive model.
| Parameters | |
|---|---|
| input | input to the model |
| Returns | true in case of success, false otherwise. |
bool BipedalLocomotion::
Perform one step of the autoregressive model.
| Returns | true in case of success, false otherwise. |
|---|
bool BipedalLocomotion::
Reset the autoregressive model.
| Parameters | |
|---|---|
| input | raw mann input. |
| leftFoot | state of the left foot. |
| rightFoot | state of the right foot. |
| basePose | |
| baseVelocity | current base velocity expressed in mixed representation. |
| Returns | true in case of success, false otherwise. |
bool BipedalLocomotion::
Reset the autoregressive model.
| Parameters | |
|---|---|
| input | raw mann input. |
| leftFoot | state of the left foot. |
| leftFootSchimittTriggerState | |
| rightFoot | state of the right foot. |
| rightFootSchimittTriggerState | |
| basePosition | current base position. |
| baseVelocity | current base velocity expressed in mixed representation. |
| autoregressiveState | the autoregressive state at which you want to reset your model. |
| time | time used to reset the system |
| Returns | true in case of success, false otherwise. |
bool BipedalLocomotion::
Check if the output is valid.
| Returns | true if the output is valid, false otherwise. |
|---|
const Output& BipedalLocomotion::
Get the output from MANNAutoregressive.
| Returns | the output of the system. |
|---|
const MANNInput& BipedalLocomotion::
Get the structure that has been used as input for MANN.
| Returns | the MANNInput |
|---|
const AutoregressiveState& BipedalLocomotion::
Get the autoregressive state required to rest MANNAutoregressive.
| Returns | the AutoregressiveState |
|---|